Aplicaciones de largos recorridos
La industria minera, la manipulación de material a granel y otras aplicaciones en entornos duros requieren que prestemos especial atención a cada detalle a la hora de diseñar un sistema de guiado de cables en movimiento. Hay muchas condiciones adversas que este tipo de sistemas deben soportar cada día sin ningún fallo.

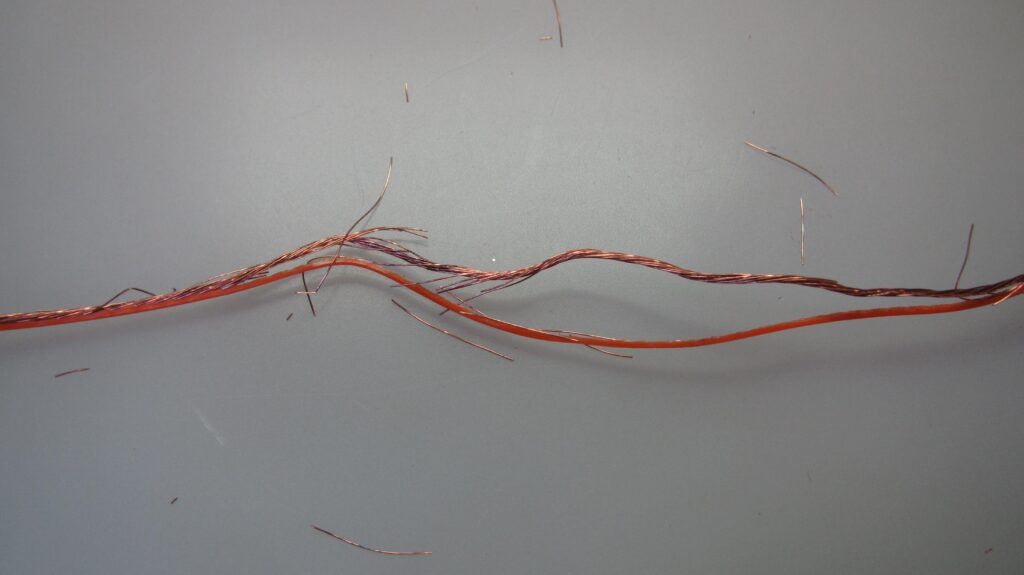
Las cadenas portacables están en contacto con materiales corrosivos y abrasivos como: el carbón, la taconita, la arena y la grava. Recorren grandes distancias de cientos de metros, soportan vibraciones de los equipos cercanos y pueden sufrir acumulaciones de nieve y hielo. Todo aquello que no esté preparado realmente para entornos duros, termina fallando. En este artículo nos gustaría hablar sobre un factor que se pasa por alto fácilmente cuando se diseña el sistema de guiado de cables dinámico adecuado: la desviación lateral de la estructura móvil con respecto a los rieles del sistema o, dicho de forma más simple, los movimientos laterales de la cadena portacables mientras se mueve en línea recta.
Configuración de cadenas portacables
Las dos configuraciones habituales de los sistemas de cadena portacables son los recorridos cortos autosoportados y los deslizamientos de largo recorrido.
Recorridos cortos
Estos primeros son exactamente lo que su nombre indica: recorridos cortos, normalmente por debajo de los 10 metros, y sin necesidad de ningún apoyo. Son lo suficientemente fuertes como para sostenerse a sí mismos y al peso de carga para una distancia específica. Cada cadena portacables puede soportar un recorrido máximo autosoportado dependiendo de su peso de llenado. Para superar este límite, se requiere una cadena portacables más grande y fuerte o utilizar la configuración conocida como deslizamiento de largo recorrido.
Deslizamiento de largo recorrido
Esta configuración se utiliza comúnmente en aplicaciones para la industria minera y la manipulación de material a granel, con una distancia que puede ir desde 10 metros hasta unos pocos cientos de metros.
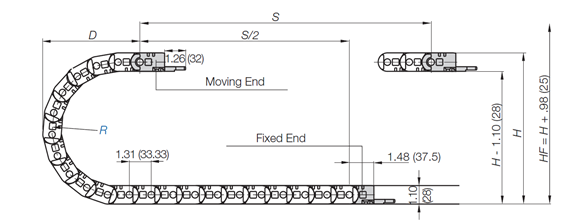
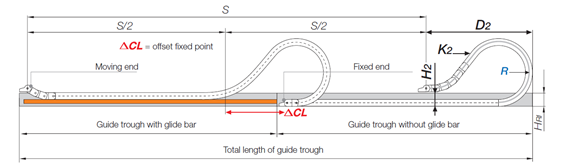
En igus lo llamamos deslizamiento de largo recorrido porque la cadena portacables se desliza sobre sí misma dentro de un sistema de carril. El carril mantiene el ramal superior de la cadena perfectamente alineado con el ramal inferior. La cadena portacables tiene un extremo fijo y un extremo móvil. El extremo fijo suele estar en el centro del recorrido, pero no siempre, y el extremo móvil está unido a la estructura en movimiento. El sistema de carril de guiado se instala en paralelo a los rieles de la estructura móvil. En un mundo ideal, la estructura móvil seguiría los rieles y el sistema del carril sin desviarse.
Desviación lateral en las cadenas portacables

Sin embargo, no vivimos en un mundo perfecto. A veces pensamos que una estructura móvil montada sobre rieles es perfecta, pero todas las estructuras móviles montadas sobre rieles tienen algún grado de desviación lateral que puede surgir de varios factores contribuyentes. Un ejemplo: la superficie de contacto de la rueda de un tranvía podría ser más ancha que el ancho del riel, permitiendo el movimiento lateral. La estructura fija podría desviarse bajo la carga de la estructura móvil. La estructura móvil podría no ser perfectamente cuadrada. Los rieles podrían no ser rectos o paralelos entre sí. Todos estos factores afectan a la desviación lateral.
Los sistemas de cadena portacables tienen un límite de desviación lateral basado en la serie de la cadena portacables. Si la desviación lateral de la estructura móvil es mayor que la permitida, la cadena empujará contra los lados del carril creando puntos de desgaste, fatiga del metal, y finalmente se quedará trabada en el sistema del carril. Un brazo flotante de arrastre es un componente vital necesario para compensar esta desviación lateral.
Brazo flotante de arrastre
Un brazo flotante de arrastre (FTA) es un componente especializado que incorpora un cojinete lineal entre el ramal superior e inferior. El ramal inferior se une al extremo móvil de la cadena portacables y el ramal superior se une al brazo de arrastre de la estructura móvil. El cojinete lineal permite la desviación lateral de la estructura móvil y el sistema de guiado.
igus ofrece tres categorías de brazos flotantes de arrastre, cada una diseñada para distintas aplicaciones: básica, estándar y “Heavy Duty” (altas cargas). Las versiones estándar y “Heavy Duty” incorporan una placa de apoyo y ruedas en el ramal inferior que se desplazan dentro del sistema del carril, manteniendo el ramal superior de la cadena portacables alineado con el ramal inferior. La versión básica no requiere ruedas, ya que está diseñada para aplicaciones de cadena portacables más pequeñas y de menor rendimiento. Cada versión también tiene una fuerza máxima medida en Newtons que nos ayuda a seleccionar el brazo adecuado para tu aplicación.
Este vídeo muestra cómo funciona un brazo flotante de arrastre:
El valor de desviación lateral de nuestras tres versiones de FTA se muestran a continuación. Si la desviación lateral de tu aplicación se encuentra fuera de estos estándares, también podemos ayudarte con el asesoramiento y diseño de un brazo de arrastre flotante idóneo para tu aplicación.
- Brazo flotante de arrastre básico:
+/- 25 mm o menos +/- 2,5 cm - Brazo flotante de arrastre estándar:
+/- 35 mm o menos +/- 2,5-7,6/20 cm - Brazo flotante de arrastre HD:
+/- 30 mm o menos +/- 2,5-2,5/20 cm
Conclusión
Tanto si tu aplicación se encuentra en una central eléctrica de carbón, en un cargador de buques para materiales a granel o en una grúa, podemos seleccionar con confianza el brazo flotante de arrastre adecuado para tu aplicación y asegurar que tu sistema funcionará todos los días sin fallo alguno.
Si quieres saber más sobre los brazos flotantes de arrastre de igus, no dudes en contactar con nuestros técnicos, estaremos encantados de asesorarte.
Y recuerda: ¡nuestras herramientas online y los servicios de diseño son siempre gratuitos!